| EXCALIBUR Adaptive Constraint-Based Agents in Artificial Environments |
| [DOCUMENTATION] | [Preface] [Introduction] [Local] [SCSP] [Model] [Application] [Conclusion] |
| [ Please note: The project has been discontinued as of May 31, 2005 and is superseded by the projects of the ii Labs. There won't be further updates to these pages. ] |
(Related publication: [PUBLink])
This chapter shows how the techniques developed in the previous chapters are combined to realize the planning of an agent's behavior. Section [Revisiting the Orc Quest Example] presents a domain-dependent solution for the Orc Quest example described in Section [Resources]. For a domain-independent system, more general constraint implementations must be available, which is detailed in Section [Domain-Independent Planning].
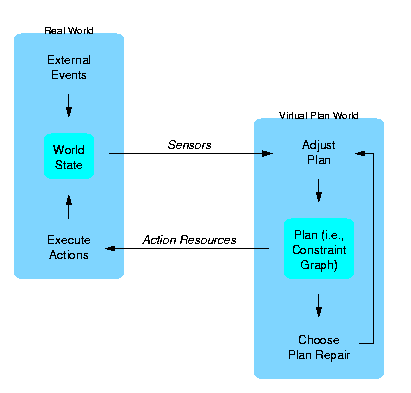
The planning process follows the procedure shown in the figure below.
In each iteration, the sensor data is used to update the current plan (i.e., the constraint graph). This means that for all sensed Objects the Current State variables of the Objects' State Resources are updated. If a sensed real-world object has no counterpart in the constraint graph, a corresponding Object is added to the graph. In addition, the Current Time variable is updated.
Once the plan has been updated, a plan repair is initiated. A plan repair means that a constraint is selected by the global search control to improve the constraint's current goal-/cost-function value. The constraint's heuristics determine how the constraint will change some of its variables' values or/and use graph productions to change the constraint graph.
The planning iteration is ended by marking the action resources' Action Tasks that begin at the Current Time as being under execution (using their ExecutionState variable), by marking the Action Tasks that end at the Current Time as being executed, and by starting/continuing the execution of the Action Tasks that are marked for execution.
Usually, the structural constraints have to be enforced in the same way as the other constraints. However, to implement this is costly and not feasible within the context of this project. Instead, the enforcement of the structural constraints is done in a pre-emptive way: only heuristics may be used which can be shown not to threaten any structural constraints.
| [DOCUMENTATION] | [Preface] [Introduction] [Local] [SCSP] [Model] [Application] [Conclusion] |
For questions, comments or suggestions, please contact us.
Last update:
May 20, 2001 by Alexander Nareyek