| EXCALIBUR Adaptive Constraint-Based Agents in Artificial Environments |
| [INFORMATION GATHERING] | [Run-Time Variables] [Hands-off Goals] |
| [ Please note: The project has been discontinued as of May 31, 2005 and is superseded by the projects of the ii Labs. There won't be further updates to these pages. ] |
(Related publications: [PUBLink] [PUBLink])
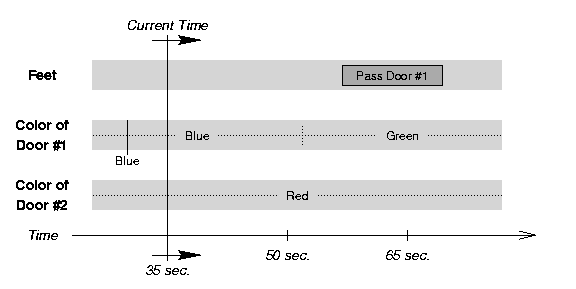
Hands-off goals [PUBLink] [PUBLink] that forbid the change of states are not necessary either. The formulation of goals like passing the blue door is a problem only for planners, who cannot express that the door has to be blue at the moment of the goal formulation. These planners have to introduce such hands-off goals to prevent the planner from passing another door after painting it. Temporal planners can express these goals much more adequately because they can quantify the preconditions temporally (see figure below). Moreover, in dynamic multi-agent domains, such hands-off goals do not help, as external actions might change the states.
| [INFORMATION GATHERING] | [Run-Time Variables] [Hands-off Goals] |
For questions, comments or suggestions, please contact us.
Last update:
May 20, 2001 by Alexander Nareyek