| EXCALIBUR Adaptive Constraint-Based Agents in Artificial Environments |
| [MODEL] | [Basics] [Planning as SCSP] [Incomplete Knowledge] [Conclusion] |
| [ Please note: The project has been discontinued as of May 31, 2005 and is superseded by the projects of the ii Labs. There won't be further updates to these pages. ] |
(Related publications: [PUBLink] [PUBLink] [PUBLink])
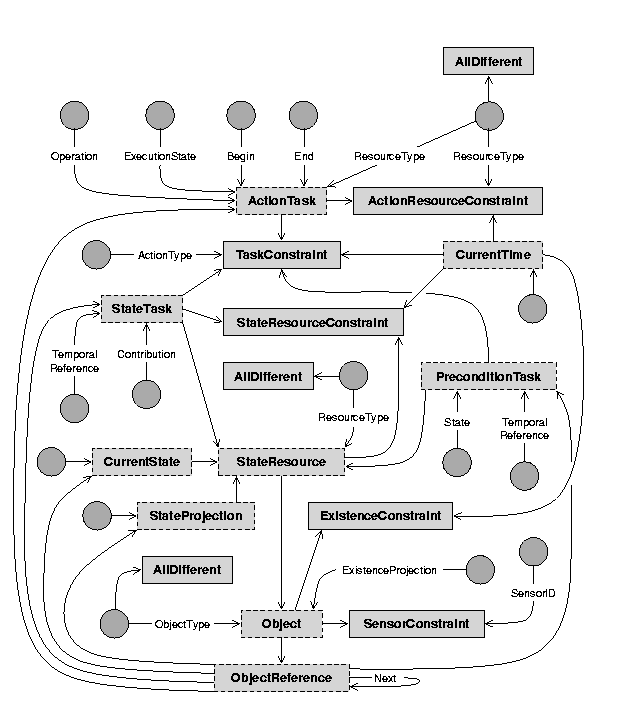
This section defines the planning model in terms of structural constraint satisfaction. The representation of the planning model as an SCSP allows us to apply the previous chapter's techniques to generate the structural search space. The figure below gives an overview of possible relations between the planning SCSP's elements.
| [MODEL] | [Basics] [Planning as SCSP] [Incomplete Knowledge] [Conclusion] |
For questions, comments or suggestions, please contact us.
Last update:
May 20, 2001 by Alexander Nareyek