| EXCALIBUR Adaptive Constraint-Based Agents in Artificial Environments |
| [SYMBOLIC SRC] | [Structures] [Selection] [SRC-H1] [SRC-H2] [SRC-H3] [SRC-H4] [SRC-H5] |
| [ Please note: The project has been discontinued as of May 31, 2005 and is superseded by the projects of the ii Labs. There won't be further updates to these pages. ] |
(Related publication: [PUBLink])
The structures used in the current implementation are extremely complex in order to provide fast access to heuristic guidance information and to minimize effort in the case of changes. For this reason, only the main structures are described here.
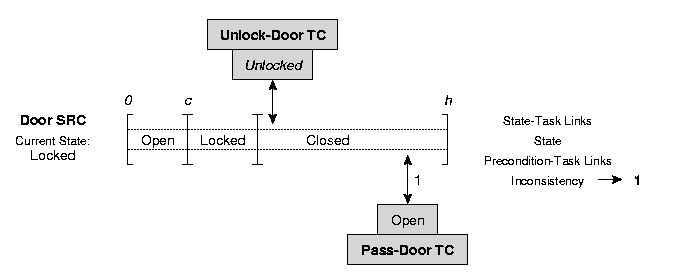
As for the Action Resource Constraint, a list of multiple-linked temporal intervals forms the constraint's basic structure (see the figure below). The timespan from 0 to h (the planning horizon) is covered by the intervals. For every distinctive TemporalReference of a linked State Task, a new interval is started. If a Sensor Constraint is connected to the SRC's Object, a new interval starts at c as well (and the value of the Current State's variable becomes the interval's state).
Every interval stores links to the State Tasks that are located at the interval's begin (and are thus responsible for the interval's existence). In addition, an interval stores a link to every Precondition Task that is within the range of the interval, together with a value that expresses the inconsistency of the Precondition Task. The inconsistency of a Precondition Task is given by a state-distance table, which provides a distance value for every possible transition from one state to another. The distance value that is considered for the inconsistency of a Precondition Task is the value for the transition from the interval's state to the state requested by Precondition Tasks. The SRC's costs are computed by the sum of the Precondition Tasks' inconsistencies.
The state-distance table is computed by calculating the minimal number of state transitions needed to get from one state to another (see the figure below). If it is not possible to get from one state to another, a special dead-end value is entered, which is higher than the maximal distance value.
![]()
| [SYMBOLIC SRC] | [Structures] [Selection] [SRC-H1] [SRC-H2] [SRC-H3] [SRC-H4] [SRC-H5] |
For questions, comments or suggestions, please contact us.
Last update:
May 20, 2001 by Alexander Nareyek