| EXCALIBUR Adaptive Constraint-Based Agents in Artificial Environments |
| [ORC QUEST REVISITED] | [Constraints] [Heuristics] [Global Search Control] [Evaluation] |
| [ Please note: The project has been discontinued as of May 31, 2005 and is superseded by the projects of the ii Labs. There won't be further updates to these pages. ] |
(Related publications: [PUBLink] [PUBLink])
Besides a general Orc Action Resource Constraint, no other action resource constraints are needed as there is no further refinement regarding the Orc's hands, feet, mouth or whatever. The Orc Action Resource Constraint can be linked to action tasks with a duration of 2 hours (if the task's Operation variable has the value catch_only_one), 5 hours (for a value of catch_a_group) and 1 hour (for a value of deliver_humans).
In addition, two state resource constraints are needed, the Pain State Resource Constraint and the Performers State Resource Constraint, which support discrete numerical domains and integrate state tasks by adding their pain/performers values. For example, the Pain State Resource Constraint's projection of the Orc's pain will be increased by 4 if a state task that has a Contribution variable with a value of 4 is connected.
Four different configurations satisfy a task constraint. These express the three actions catch_only_one, catch_a_group and deliver_humans, each of them having an action task for the Orc Action Resource Constraint, a state task for the Pain State Resource Constraint and a state task for the Performers State Resource Constraint. A fourth configuration consists of a precondition task for the Performers State Resource Constraint to establish the satisfaction goal Performers >= 5. In addition, the task constraint requires that its tasks' variables have the appropriate values (e.g., if the task constraint's ActionType variable has a value of catch_a_group, a value of 4 is required for the Contribution variable of the state task that is to be connected to the Pain State Resource Constraint).
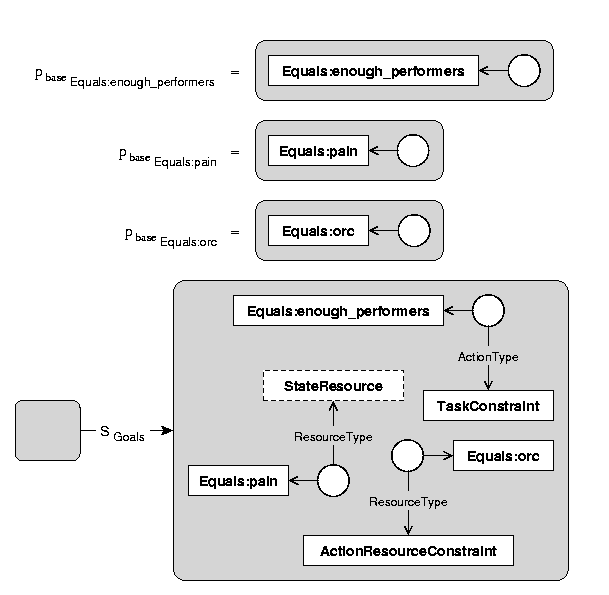
The Performers constraint's cost function is initialized to return the current plan's number of missing performers (to satisfy the precondition task of a task constraint with an ActionType variable that represents the task constraint's fourth configuration), the Pain constraint's goal function to return the plan's resulting pain, and the Orc constraint's goal function to return the plan's total duration. The specification of the problem's SGoals constraint is shown in the figure below.
The problem does not inlude issues of sensing or uncertainty, i.e., existence constraints and sensor constraints must not be considered.
| [ORC QUEST REVISITED] | [Constraints] [Heuristics] [Global Search Control] [Evaluation] |
For questions, comments or suggestions, please contact us.
Last update:
May 20, 2001 by Alexander Nareyek