| EXCALIBUR Adaptive Constraint-Based Agents in Artificial Environments |
| [BASICS] | [Actions] [States] [Objects] [Sensors] |
| [ Please note: The project has been discontinued as of May 31, 2005 and is superseded by the projects of the ii Labs. There won't be further updates to these pages. ] |
(Related publications: [PUBLink] [PUBLink] [PUBLink])
In a finite and known world, there is a fixed set of resources to be considered. Static relations to specific state resources can be used to realize the effects of actions, e.g., that the state tasks of the action Eat Peanut-17 affect the state resource Peanut-17 Location. But such static relations are no longer possible in an open world, where it is unclear which and how many resources exist. Thus, as a consequence of the open world assumption, an action's tasks must be specified with variable references for the state resources involved (e.g., Eat Peanut X instead of Eat Peanut-17).
The next problem that arises by dropping the closed-world assumption is that the relations between the state resources themselves are no longer fixed. For example, there could be two peanuts, a big and a small one, and thus multiple state resources Peanut Location and Peanut Nutritive Value. The resources of the same type are indistinguishable, and it is not clear which two belong to a specific peanut. If the Eat Peanut action were applied, it is not clear which resources would be affected, and the big peanut might vanish, while the small one would be used to decrease hunger. Thus, in addition to an action's tasks, the state resources' states may involve references to indicate their relation.
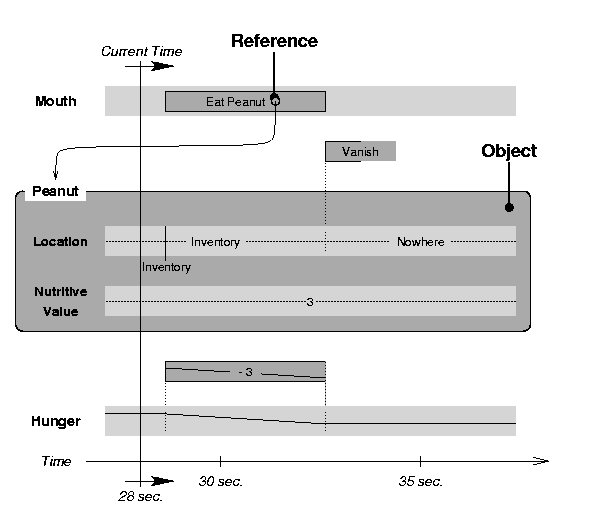
The most common relation between state resources is an aggregation - they form objects. As this is a very important relation, it is not handled by references, but explicitly represented in the model. For example, the state resources Peanut Location and Peanut Nutritive Value form an object Peanut. The figure below illustrates the application of the Eat Peanut action to a Peanut object.
| [BASICS] | [Actions] [States] [Objects] [Sensors] |
For questions, comments or suggestions, please contact us.
Last update:
May 20, 2001 by Alexander Nareyek