| EXCALIBUR Adaptive Constraint-Based Agents in Artificial Environments |
| [BASICS] | [Actions] [States] [Objects] [Sensors] |
| [ Please note: The project has been discontinued as of May 31, 2005 and is superseded by the projects of the ii Labs. There won't be further updates to these pages. ] |
(Related publications: [PUBLink] [PUBLink] [PUBLink])
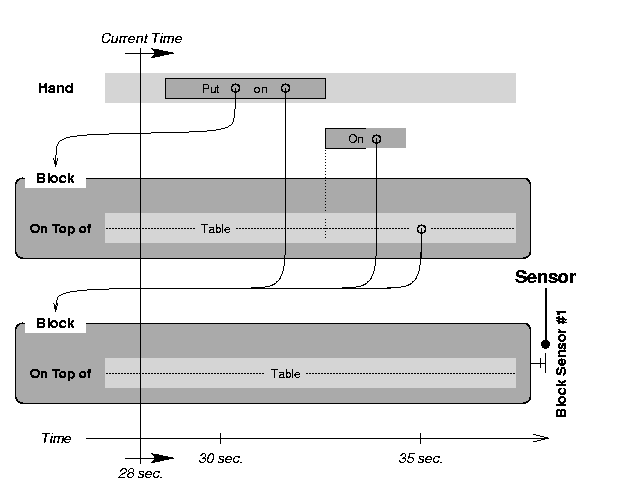
The agent must be capable of acquiring new information about the environment, which must somehow be integrated into the planning process. The real-world data is collected by so-called sensors. The sensors report actual data, like the current level of hunger or the properties of a sighted peanut. We assume high-level sensoring that provides ready-structured objects. Sensors are related to the virtual objects of the plan. The figure below shows an example of a plan to put one block on top of another where only one of the blocks has already be sensed.
Having introduced the concept of sensors, we are faced with the question of whether a planning object will ever be connected to a sensor, i.e., if a counterpart in the real world actually exists or will exist. For example, it is pointless optimistically creating/revising a plan so that a matching Key is always found next to a locked Door. However, the existence of objects is not a yes/no matter. It is temporally dependent (a Key may become available after a Lock is installed) and a probabilistic matter (the Key may become available). Thus, we need a temporally projected probabilistic measure for every object, which expresses the confidence that this object really exists - an existence projection.
| [BASICS] | [Actions] [States] [Objects] [Sensors] |
For questions, comments or suggestions, please contact us.
Last update:
May 20, 2001 by Alexander Nareyek