The Extensible Conventional Task Constraint
| EXCALIBUR Adaptive Constraint-Based Agents in Artificial Environments |
| [PLANNING AS SCSP] | [Time] [Actions] [Operations] [States] [Objects] [References] [Sensors] [Existence] [Correctness] [Formulation] |
| [ Please note: The project has been discontinued as of May 31, 2005 and is superseded by the projects of the ii Labs. There won't be further updates to these pages. ] |
(Related publications: [PUBLink] [PUBLink] [PUBLink])
An action consists of a set of different preconditions, operations and resulting state changes. These elements are represented by tasks, i.e., there are Precondition Tasks for precondition tests, Action Tasks for operations and State Tasks for state changes. All tasks are represented by object constraints and must be connected to a Task Constraint.
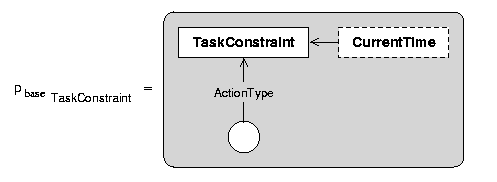
A Task Constraint enforces a certain task configuration (i.e., it specifies which tasks are to be connected to the Task Constraint and what kind of restrictions apply to the tasks' variables) for a specific action, including the temporal order of the tasks. The specific action to be expressed is determined by the value of a connected ActionType variable (see figure below). The cost function of the Task Constraint describes the distance from the current task configuration to the configuration that is demanded by the ActionType variable. In addition, the Begin of nonexecuted Action Tasks before the Current Time is penalized.
The Extensible Conventional Task Constraint
An action's task may not also be part of another action. This is ensured by the structural constraint of the figure below.
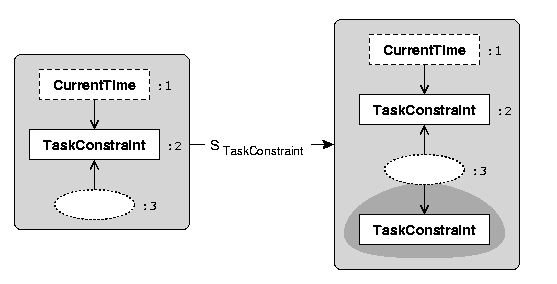
The Structural Task Constraint
| [PLANNING AS SCSP] | [Time] [Actions] [Operations] [States] [Objects] [References] [Sensors] [Existence] [Correctness] [Formulation] |
For questions, comments or suggestions, please contact us.
Last update:
May 20, 2001 by Alexander Nareyek