The Extensible Object Constraint Object Reference
| EXCALIBUR Adaptive Constraint-Based Agents in Artificial Environments |
| [PLANNING AS SCSP] | [Time] [Actions] [Operations] [States] [Objects] [References] [Sensors] [Existence] [Correctness] [Formulation] |
| [ Please note: The project has been discontinued as of May 31, 2005 and is superseded by the projects of the ii Labs. There won't be further updates to these pages. ] |
(Related publications: [PUBLink] [PUBLink])
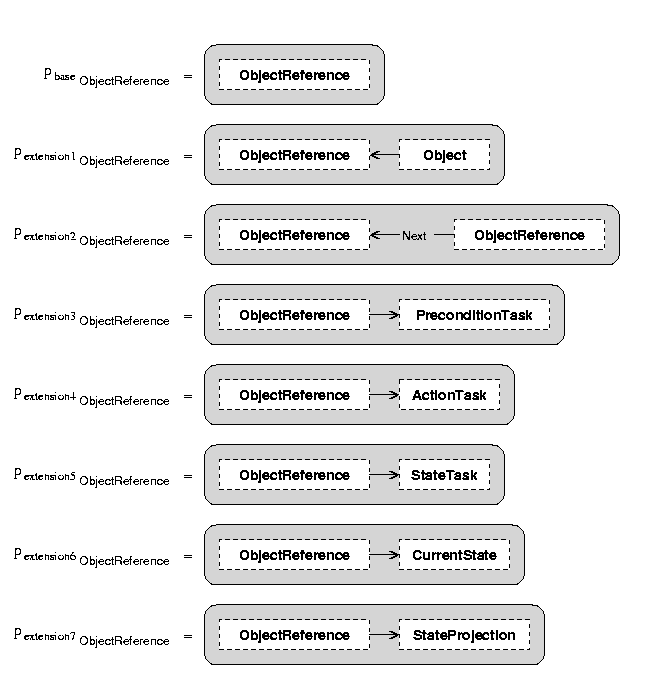
All tasks can use Object References to Objects, e.g., a general State Task that causes one Object X to be on top of another Object Y can make use of Object References to assign its variables X and Y. Likewise, the Current State and the State Projection can have Object References (see following figure). An Object Reference can also be linked to another Object Reference to realize a list. For example, the State Task of the previous example would have to use a list (instead of a set) with two Object References to distinguish the two Objects (which Object has to be placed onto which). The Task Constraint (or SRC in the case of dependency effects) must ensure that the reference structures are valid.
The Extensible Object Constraint Object Reference
All Object References are required to be connected to exactly one Object that is to be referenced (see figure below).
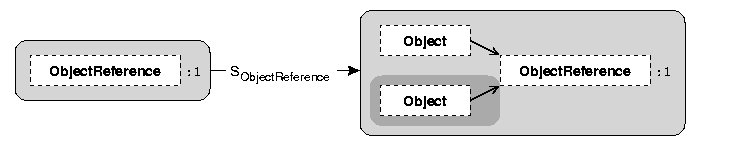
The Structural Constraint Object Reference
| [PLANNING AS SCSP] | [Time] [Actions] [Operations] [States] [Objects] [References] [Sensors] [Existence] [Correctness] [Formulation] |
For questions, comments or suggestions, please contact us.
Last update:
May 20, 2001 by Alexander Nareyek