| EXCALIBUR Adaptive Constraint-Based Agents in Artificial Environments |
| [PLANNING AS SCSP] | [Time] [Actions] [Operations] [States] [Objects] [References] [Sensors] [Existence] [Correctness] [Formulation] |
| [ Please note: The project has been discontinued as of May 31, 2005 and is superseded by the projects of the ii Labs. There won't be further updates to these pages. ] |
(Related publication: [PUBLink])
To apply the SCSP handling methods described in Section [Structural Constraint Satisfaction Problems], some restrictions must be fulfilled.
The specification of the planning SCSP does not include any nonextensible constraints.
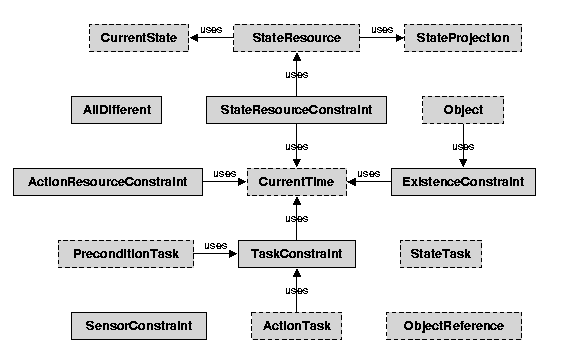
The figure below shows the integrations of extensible constraints' base graphs. It confirms that there are no cycles for the planning problem's specification.
The only constraint with a pmax graph is the Sensor Constraint. The only way to extend the pbaseSensorConstraint graph is by using the pextensionSensorConstraint graph, which immediately produces the pmaxSensorConstraint graph.
| [PLANNING AS SCSP] | [Time] [Actions] [Operations] [States] [Objects] [References] [Sensors] [Existence] [Correctness] [Formulation] |
For questions, comments or suggestions, please contact us.
Last update:
May 20, 2001 by Alexander Nareyek