The Extensible Object Constraint Current Time
| EXCALIBUR Adaptive Constraint-Based Agents in Artificial Environments |
| [PLANNING AS SCSP] | [Time] [Actions] [Operations] [States] [Objects] [References] [Sensors] [Existence] [Correctness] [Formulation] |
| [ Please note: The project has been discontinued as of May 31, 2005 and is superseded by the projects of the ii Labs. There won't be further updates to these pages. ] |
(Related publications: [PUBLink] [PUBLink] [PUBLink])
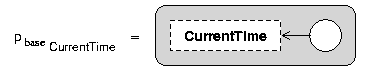
The very first thing we need is a variable for the current time because the constraints' heuristics and cost/goal functions use this as input. For example, actions that are still to be executed should not be placed in the past. The variable is marked by a Current Time object constraint (see figure below).
The Extensible Object Constraint Current Time
As there can only be one current time, we need a structural constraint to prevent there being multiple variables representing the current time (see figure below).
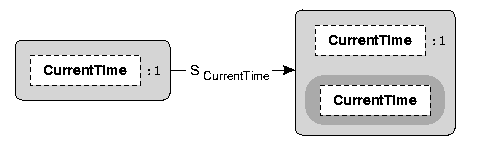
The Structural Constraint Current Time
| [PLANNING AS SCSP] | [Time] [Actions] [Operations] [States] [Objects] [References] [Sensors] [Existence] [Correctness] [Formulation] |
For questions, comments or suggestions, please contact us.
Last update:
May 20, 2001 by Alexander Nareyek