The Extensible Conventional Sensor Constraint
| EXCALIBUR Adaptive Constraint-Based Agents in Artificial Environments |
| [PLANNING AS SCSP] | [Time] [Actions] [Operations] [States] [Objects] [References] [Sensors] [Existence] [Correctness] [Formulation] |
| [ Please note: The project has been discontinued as of May 31, 2005 and is superseded by the projects of the ii Labs. There won't be further updates to these pages. ] |
(Related publications: [PUBLink] [PUBLink])
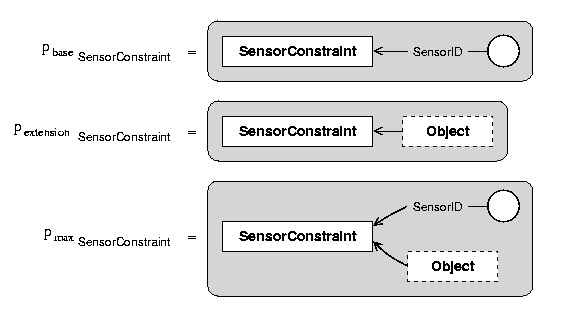
The sensors provide data that is structured according to the planning model's Objects. The linking of a sensor with an appropriate Object is done by a Sensor Constraint that links a SensorID variable, which specifies the real-world's sensor, with an Object (see following figure). The Sensor Constraint ensures that the Object's ObjectType variable corresponds to the sensor data and that the Object has all necessary State Resources. The productions for an addition/deletion of a Sensor Constraint are not allowed to be applied by any improvement heuristic. If the Sensor Constraint is satisfied, the sensor data can provide values for the CurrentState variables of the connected Objects' SRCs.
The Extensible Conventional Sensor Constraint
Again - as with an Object's ObjectType - a Sensor Constraint's Object is not directly included in the pbase graph, as this allows the search to exchange a Sensor Constraint's Object for a similar one without deleting the whole Sensor Constraint, e.g., if the search decides that a sensed Peanut is a new one instead of the Peanut that has been eaten. However, this necessitates the structural constraint of the following figure, which ensures that a sensor is linked to an Object.
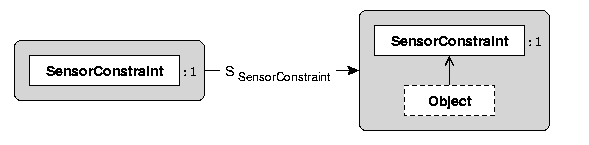
The Structural Sensor Constraint
| [PLANNING AS SCSP] | [Time] [Actions] [Operations] [States] [Objects] [References] [Sensors] [Existence] [Correctness] [Formulation] |
For questions, comments or suggestions, please contact us.
Last update:
May 20, 2001 by Alexander Nareyek